I took the design project a good step forward. I wrote 4 functions for the robot equipped with Mecanum Wheels.
These 4 functions monitor a file storage after control commands for the robot. As soon as they are available, they are executed. The output of the distance covered is also in a Message File in YAML format.
After that, the processed commands are moved to a store folder.
These 4 functions are started and monitored and terminated in another program. The main program as a command line program asks for the task to be performed and creates the corresponding command files based on the inputs.
In the main program, an application server is still started in parallel. This presents the possible functions as input fields that can be used as a web form.
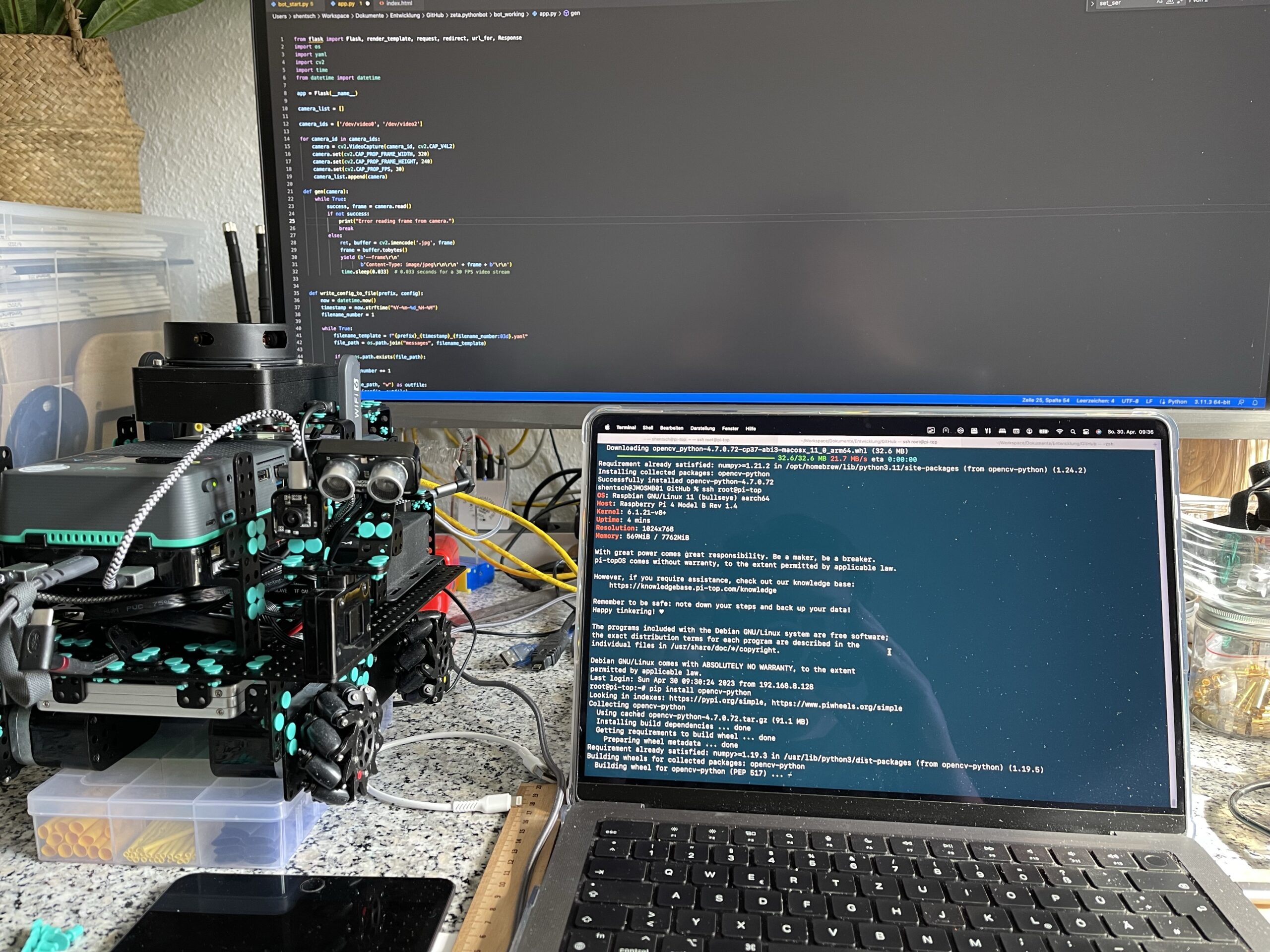
https://github.com/nincns/pi-top-Zeta-OmniBot




Leave a Reply