Category: PI-Top
-
Pi-Top Zeta OmniBot
I took the design project a good step forward. I wrote 4 functions for the robot equipped with Mecanum Wheels. These 4 functions monitor a file storage after control commands for the robot. As soon as they are available, they are executed. The output of the distance covered is also in a Message File in…
-
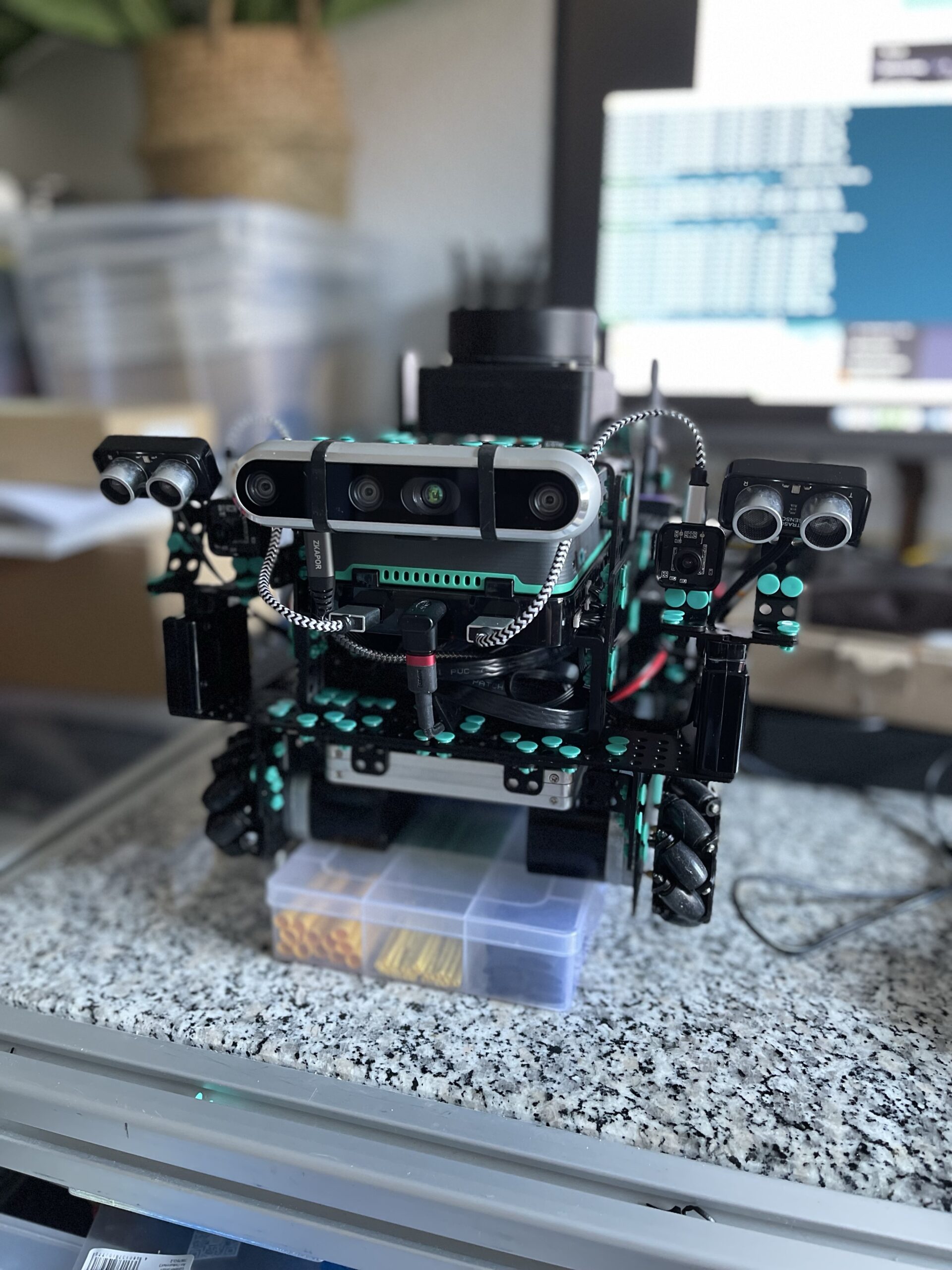
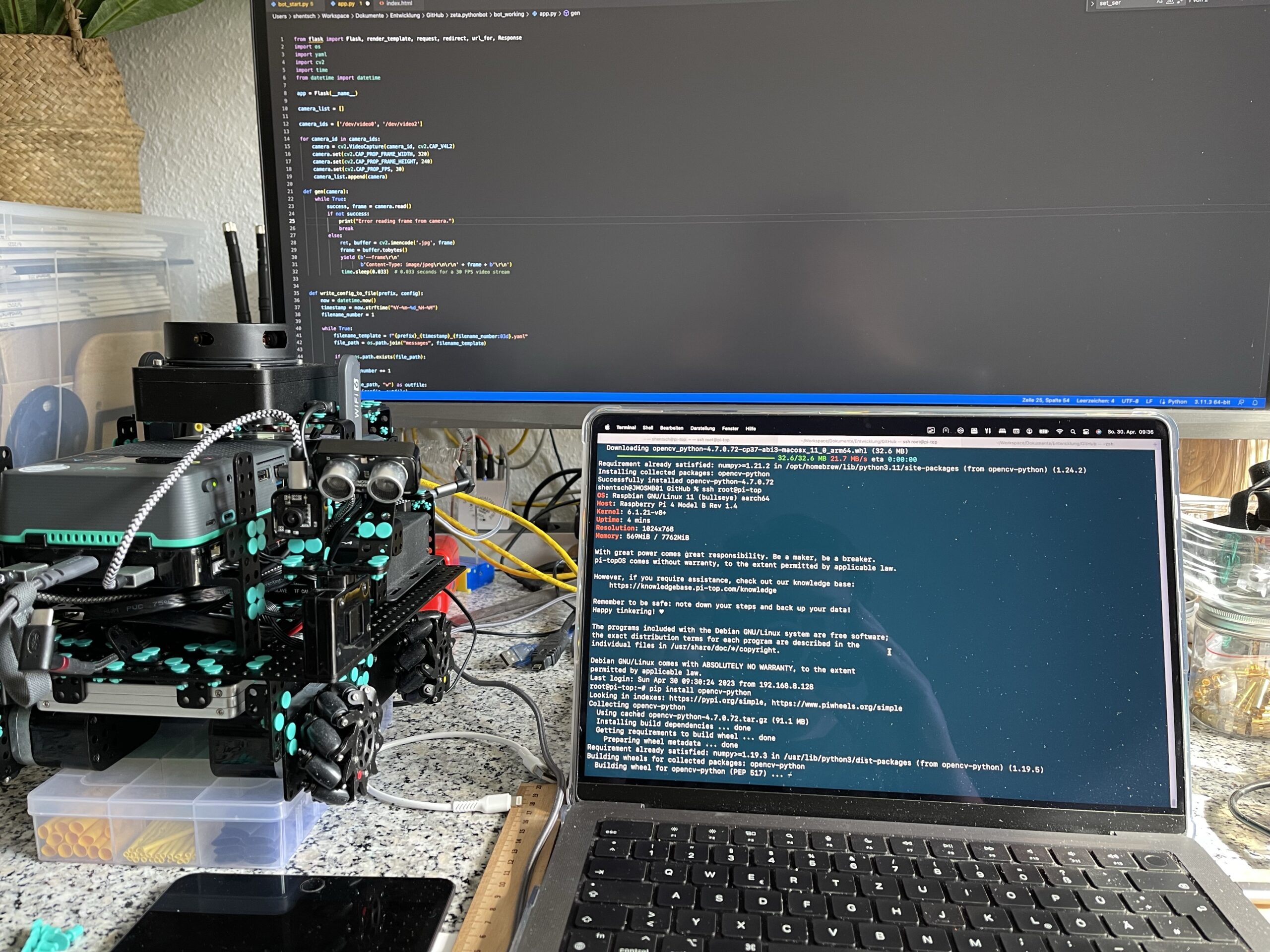
Beta Pythonbot is growing into the next phase
At the weekend I started to rebuild the existing Pythonbot the Pi-Top, which was previously equipped with a chain drive. I had ordered a second robotic kit and convert the drive to a Mecanum Wheels 4 wheel drive. Fortunately, the ordered wheels had the same recording, so I could exchange the original wheels 1:1 for…
-
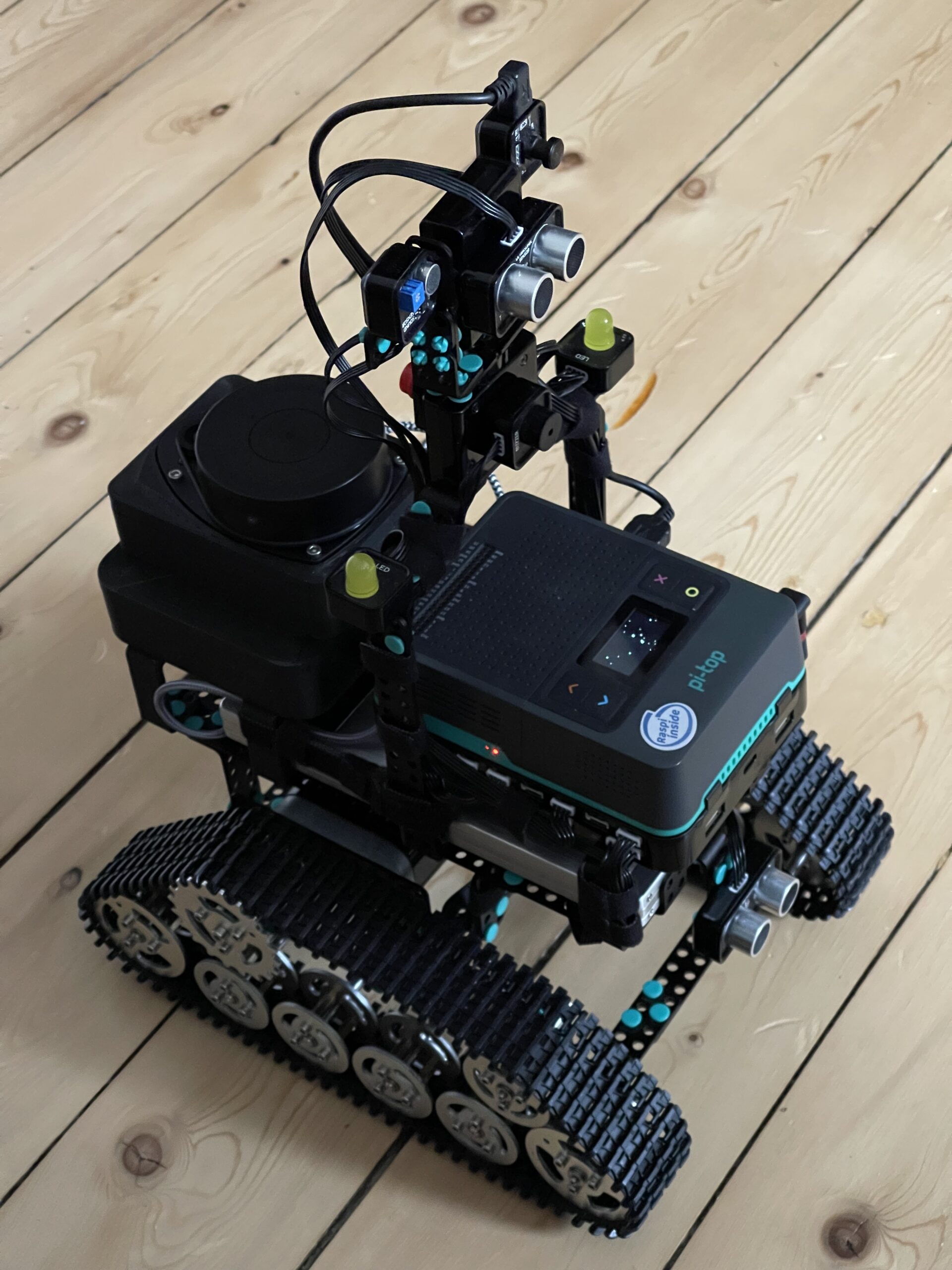
beta pi-top robot
The time has finally come, after weeks of building on the Pi-Top, it is ready, just in time for Mouse Day and Open House. I built another Raspberry for the robot in a special housing, which controls the Lidar sensor, which so far only measures the environment. For the drive I replaced the usual wheels…