At the weekend I started to rebuild the existing Pythonbot the Pi-Top, which was previously equipped with a chain drive.
I had ordered a second robotic kit and convert the drive to a Mecanum Wheels 4 wheel drive.
Fortunately, the ordered wheels had the same recording, so I could exchange the original wheels 1:1 for the Mecanum wheels.
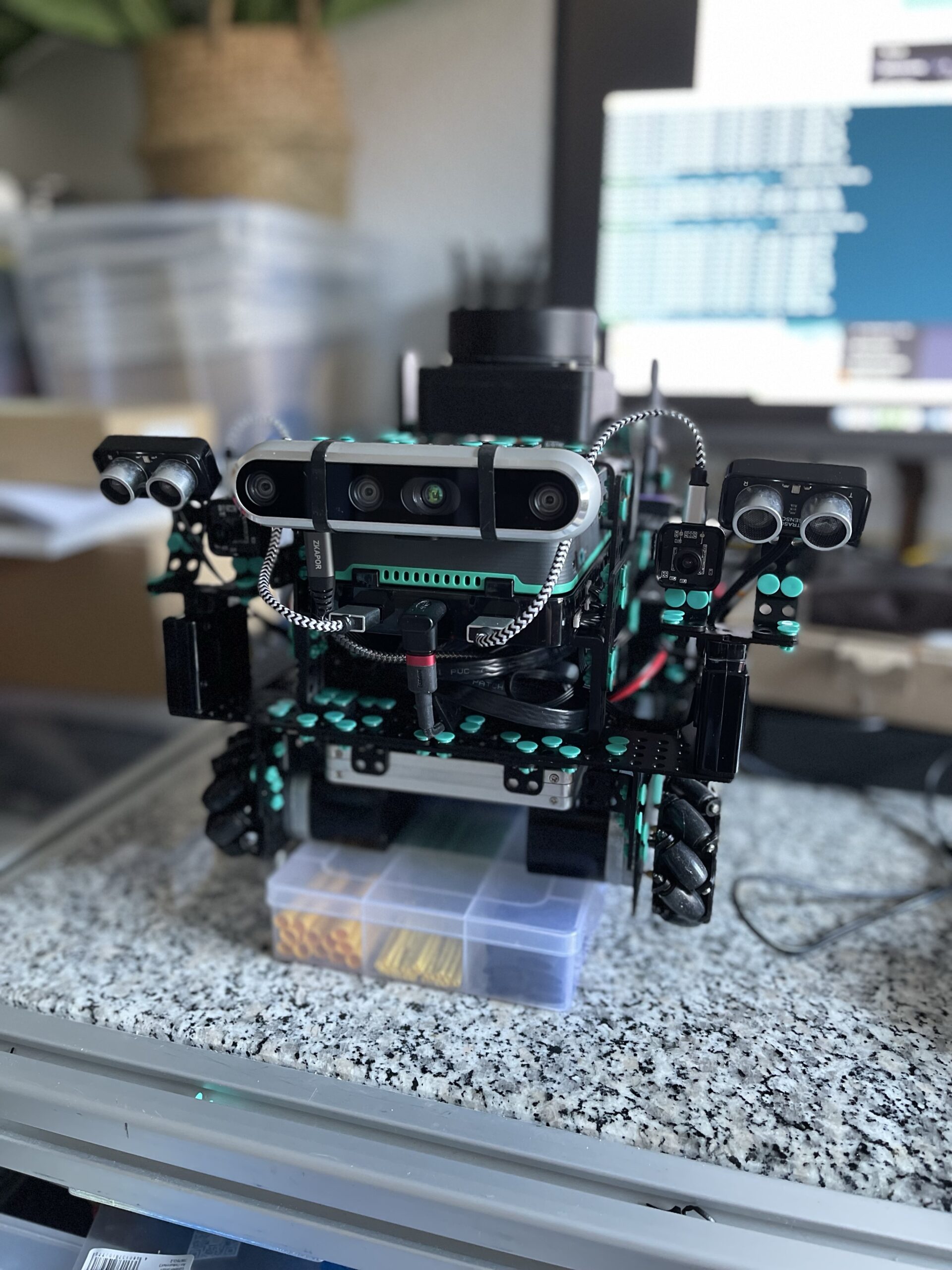
Of course, in addition to the existing components, the others have also been added. Means a total of 4 servos, 2 cameras and 2 ultrasonic sensors.
This results in a variety of new possibilities. With the existing now search finally in compact design.







The previous hardware now looks like this:
- Pi-Top 4
- Raspberry Pi CM4
- Slamtec RPLIDAR A1
- GL.iNet AXT1800
- Aceyoon Laptop Powerbank 20000mAh
- Intel RealSense D455 Webcam
Leave a Reply