











The time has finally come, after weeks of building on the Pi-Top, it is ready, just in time for Mouse Day and Open House.
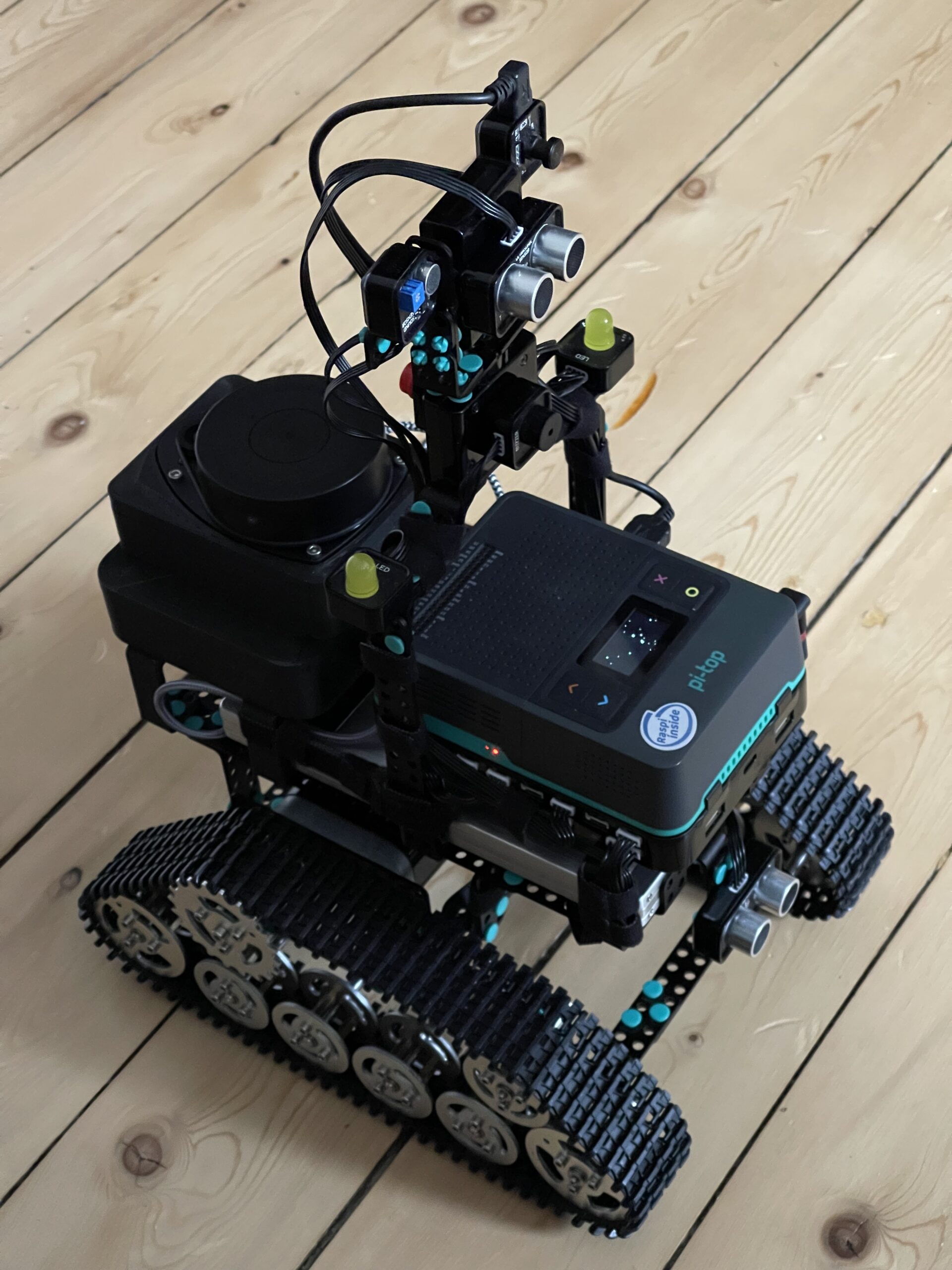
I built another Raspberry for the robot in a special housing, which controls the Lidar sensor, which so far only measures the environment.
For the drive I replaced the usual wheels of the Robotic Kit with a chain drive, which is often found in model kits of this kind. Fortunately everything fitted well, the components of the Pi-Top can be screwed with M4 screws, which also have the wheels and rollers of the chain drive.
Leave a Reply